
About me
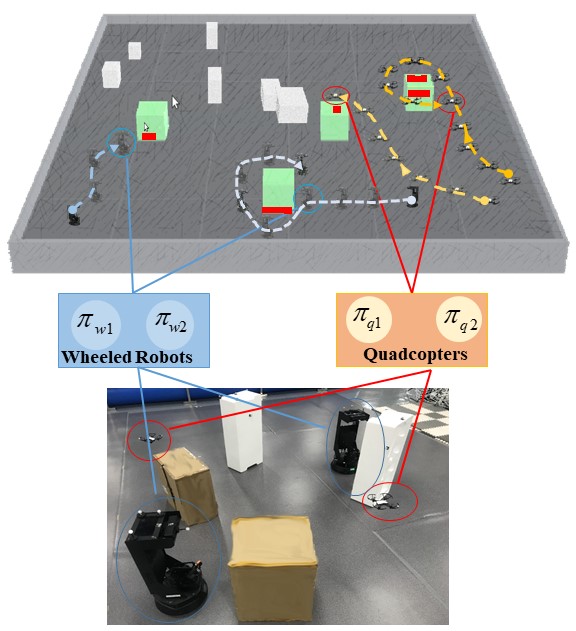
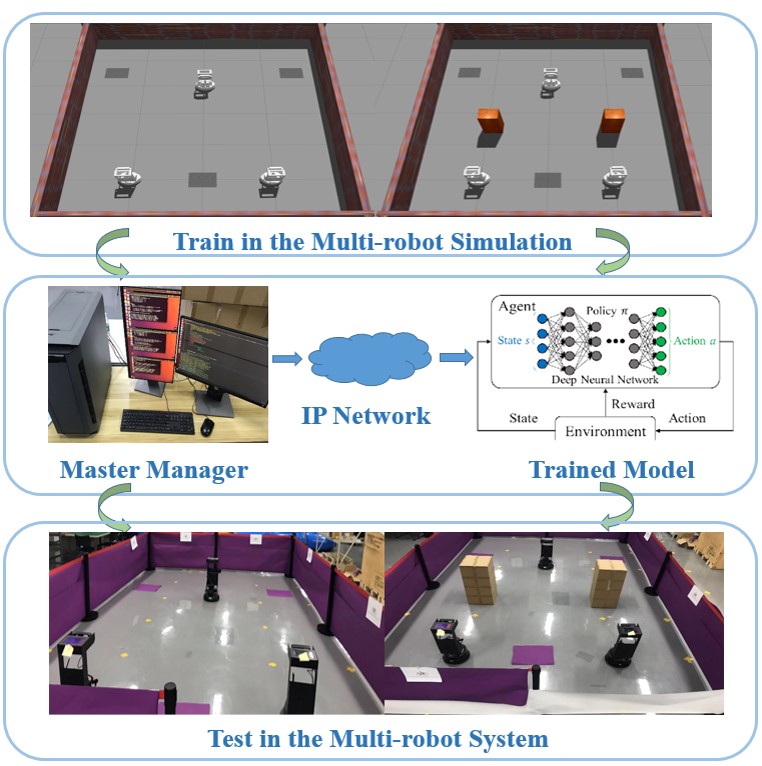
I'm working as a researcher in Shenzhen Institute of Artificial Intelligence and Robotics for Society. I'm mainly doing research on cooperative decision-making and planning by deep Reinforcement Learning for heterogeneous robots in the simulation and real world.
I mainly foucs on robot learning in the field of robotics. My main research interests include decison-making, planning in multi-robot systems by learning and optimization algorithms(eg: reinforcment learning, meta learning, representaition learning, etc) and sim2real technology(eg: domain randomization, domain adaptation, transfer learning, etc).
I'm looking for a Phd position and want to pursue in the field of robotics.
[Google Scholar]
[ResearchGate]
-
Cooperative Planning Technology of Heterogeneous Multi-Robots Based on Deep Reinforcement Learning from simulation to real world
[Video]
principal performer, 05/2020-present
Advisor: LAM Tin Lun, Assistant Professor, Chinese University of Hong Kong-Shen Zhen Shenzhen, China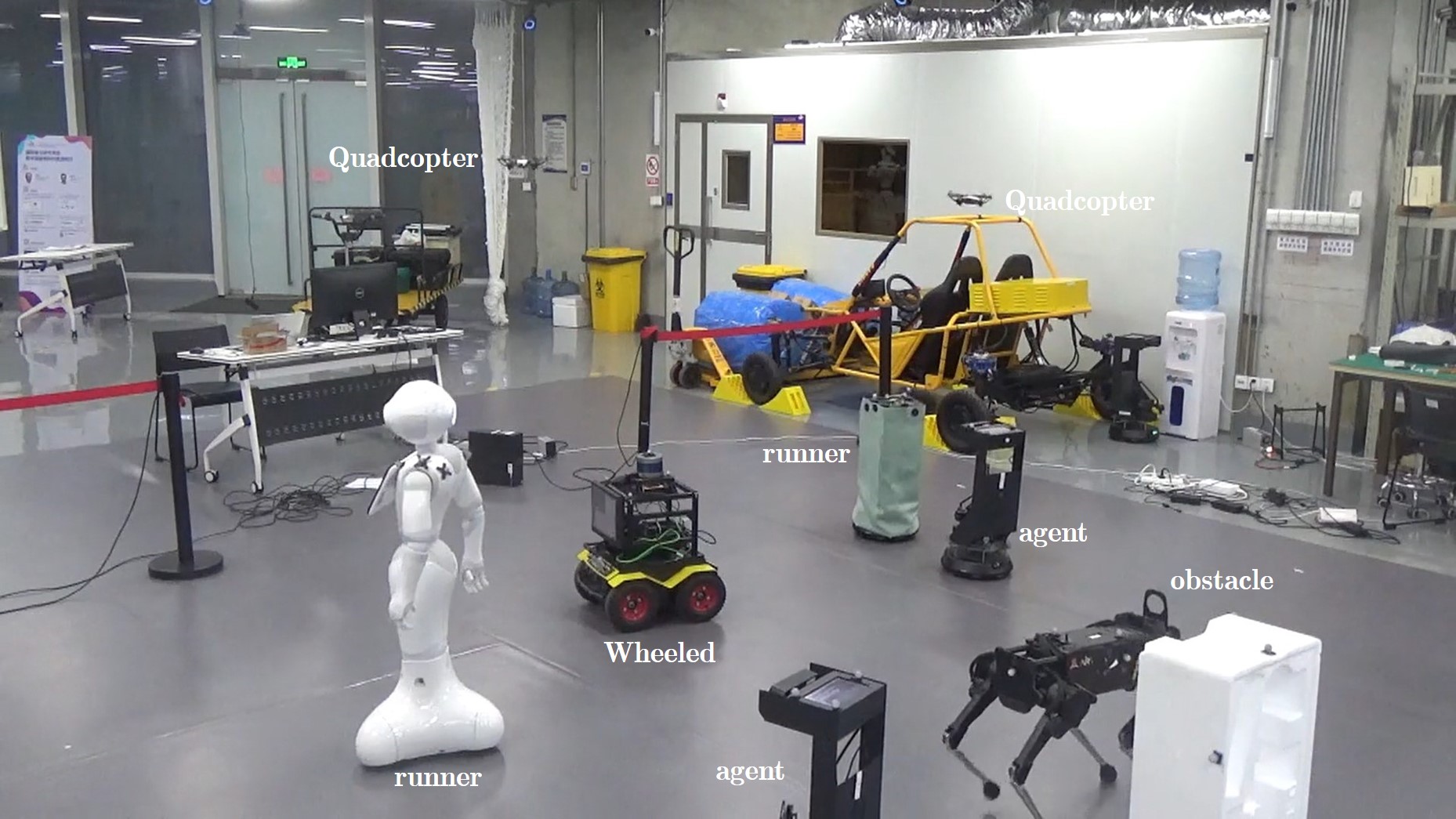
-
Generation and Optimization Technology of Aircraft Cooperative Action Based on Machine Learning
project manager and principal performer (led four graduates), 09/2017-01/2019.
Advisor: Yaoming Zhou, Associate Professor, School of Aeronautic Science and Engineering of BUAA Beijing, China -
Design flight control law, guidance & obstacle avoidance algorithm and flight control system & ground station of unmanned helicopter
Independent researcher, 10/2016-06/2018.
Advisor: Yaoming Zhou, School of Aeronautic Science and Engineering of BUAA Beijing and Dongguan, China -
Research on flight simulation and verification technology of human-in-the-loop semi-physical fire extinguishing system
project manager and principal performer (led three graduates), 07/2017-06/2018.
Advisor: Hu Liu, Professor, School of Aeronautic Science and Engineering of BUAA Beijing and Zhuhai, China -
Research on aircraft effectiveness data mining technology based on machine learning
project manager (led three graduate students and one undergraduate), 05/2017-06/2019.
Advisor: Hu Liu, Professor, School of Aeronautic Science and Engineering of BUAA Beijing and Shenyang, China -
Improved design of clutch control system of unmanned helicopter
Independent researcher, 04/2017-06/2017.
Advisor: Yaoming Zhou, School of Aeronautic Science and Engineering of BUAA Beijing and Dongguan, China -
Research on coordinated control methods in approach process and overall design of unmanned helicopter & new composite wing UAV
project participant, 02/2017-06/2017.
Advisor: Zhijun Meng, Associate Professor, School of Aeronautic Science and Engineering of BUAA Dongguan, China
Research Experience
-
Meta Reinforcement Learning Based Sensor Scanning in 3D Uncertain Environments for Heterogeneous Multi-Robot Systems
Junfeng Chen, Yuan Gao, Junjie Hu, Fuqing Deng, Tin Lun Lam, IEEE International Conference on Robotics and Automation, 2021. Submitted for review
 [Video]
[Video]
-
MultiRoboLearn: An open-source Framework for Multi-robot Deep Reinforcement Learning
Junfeng Chen, Fuqin Deng, Yuan Gao, Junjie Hu, Xiyue Guo, Guanqi Liang, Tin Lun Lam, IEEE Robotics and Automation Letters, 2021. Submitted for review
 [Video]
[Video]
-
A continuous fixed-time consensus tracking method for second-order multi-agent system with matched disturbances
Yongchao Wang, Yaoming Zhou, Junfeng Chen, International Journal of Robust and Nonlinear Control. Submitted for review
-
AcousticFusion: Fusing Sound Source Localization to Visual SLAM in dynamic environments
Tianwei Zhang, Huayan Zhang, Xiaofei Li, Junfeng Chen, Tin Lun Lam, Sethu Vijayakuma, International Conference on Intelligent Robots and Systems (IROS).
-
Semantic Histogram Based Graph Matching for Real-Time Multi-Robot Global Localization in Large Scale Environment
Xiyue Guo, Junjie Hu, Junfeng Chen, Fuqing Deng, Tin Lun Lam, IEEE Robotics and Automation Letters, 2021.
-
A Two-stage Unsupervised Approach for Low light Image Enhancement
Junjie Hu, Xiyue Guo, Junfeng Chen, Guanqi Liang, Fuqing Deng, Tin Lun Lam, IEEE Robotics and Automation Letters, 2021.
-
A Guidance-Based Robust Controller for Unmanned Helicopter on Three-Dimensional Path Following
Junfeng Chen, Xiaoai Jiang, Nanyu Chen, Yaoming Zhou, The 37th Chinese Control Conference.
-
Improved design of clutch control system of unmanned helicopter
Jing Gao, Junfeng Chen, Yaoming Zhou, IEEE International Conference on Information and Automation. IEEE, 2017:104-109.
-
A novel mission planning method for UAVs’ course of action
Yaoming Zhou, Haoran, Zhao, Junfeng Chen, Yuhong Jia, Computer Communications, 152: 345-356.
-
An optimization method of objective assignment based on multi-strand chromosome genetic algorithm
Patent code: CN201810994621.4
-
A method for automatically generating an action plan of an unmanned aerial vehicle group
Patent code: CN:201810988692.3
-
Coordination control method of approaching processes of composite wing unmanned aerial vehicle
Patent code: CN201810601366.2
Publications
- First-class Graduate Scholarship (2017, 2018)
- Third Prize of Mathematics competition of Chinese College Students (Provincial Competition Area) (2015)
- National Scholarship Award issued by Ministry of Education of China (2014, 2015)
- National Endeavor Scholarship (2013)
Honors/Awards
- Programming Language & Operating System: C, C++, Java, Python, pytorch, MATLAB/Simulink, Git & Windows, Linux, ROS
- Computing Software: Origin, SPSS
- Software & Hardware: CATIA, AutoCAD, AYSYS, AnyLogic, Eclipse, μ-vision, Proteus, robotics simulator(eg:gazebo,mujoco,mlagents,Issac,etc)
- Theory: Control theory, reinforcement learning, multi-agent reinforcement learning, deep learning, meta learning, etc )